
Training a neural network using particle swarm optimization
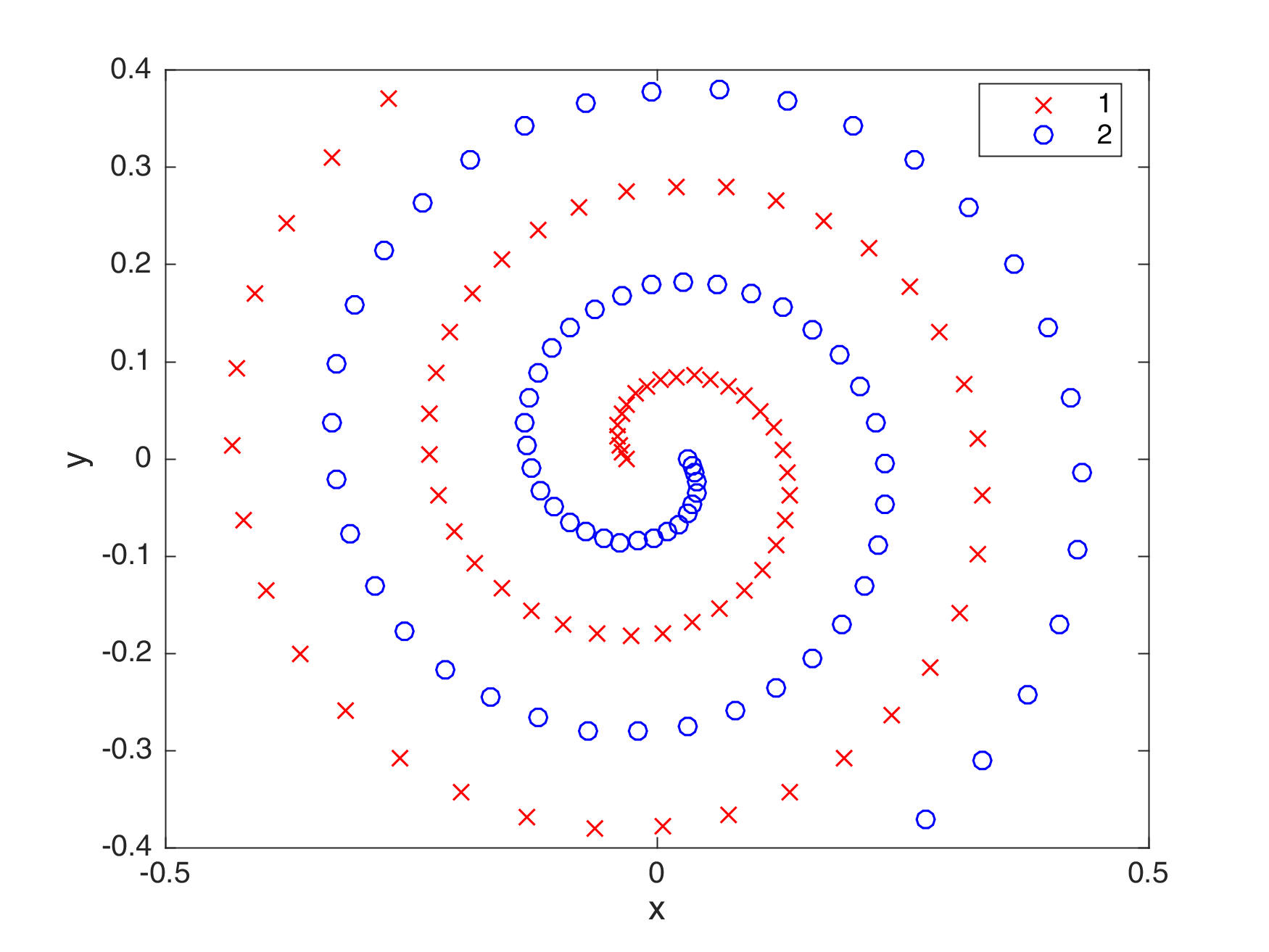
This is a simple implementation of a 2-16-1 neural network trained using Particle Swarm Optimization in order to solve the two-spiral problem. The \(\sin(z)\) and \(\sigma(z)\) activation functions were used for the input-hidden and hidden-output layers respectively (Sopena, Romero, et al., 1999). The cross-entropy error was used as the cost function. The two-spiral problem is a particularly difficult problem that requires separating two logistic spirals from one another (Lang and Witbrock, 1998).
Particle Swarm Optimization
Particle swarm optimization is a population-based search algorithm that is based on the social behavior of birds within a flock (Engelbrecht, 2007). In PSO, the particles are scattered throughout the hyperdimensional search space. These particles use the results found by the others in order to build a better solution.
Methodology
For Particle Swarm Optimization, we first initialize the swarm, and then observe the effects of the social and cognitive parameters to its performance. After that, parameter tuning will be implemented as the neural network will be cross-validated with respect to the social and cognitive parameters.
Initialization
For any particle \(n = 1,2, \dots , N\), its position \(P\) at time-step \(t\) with respect to the ANN parameters are expressed as:
\[P_{n,t} \equiv \begin{bmatrix} \Theta_{11}^{(1)} & \Theta_{12}^{(1)} & \dots & \Theta_{ij}^{(1)}\\ \Theta_{11}^{(2)} & \Theta_{21}^{(2)} & \dots & \Theta_{jk}^{(2)} \end{bmatrix}\]The particle matrix P was initialized using uniform distribution. This is to maximize the exploration capability of the particles over the search space by distributing it evenly. Using a gaussian distribution to initialize the particles will “scatter” it in a centered weight , reducing the exploration capacity.
Implementation Parameters
| Parameter | Description |
|---|---|
maxIter |
Number of iterations that the PSO algorithm will run |
swarmSize |
Number of particles in the search space. |
epsilon |
Scattering degree of the particles during initialization |
c_1 |
Cognitive component (exploration parameter). |
c_2 |
Social component (exploitation parameter). |
inertiaWeight |
Inertia weight that controls the movement of particles. |
Tuning the social and cognitive behaviour of the swarm
Here, I swept over different values for the social and cognitive components, and came up with this matrix:
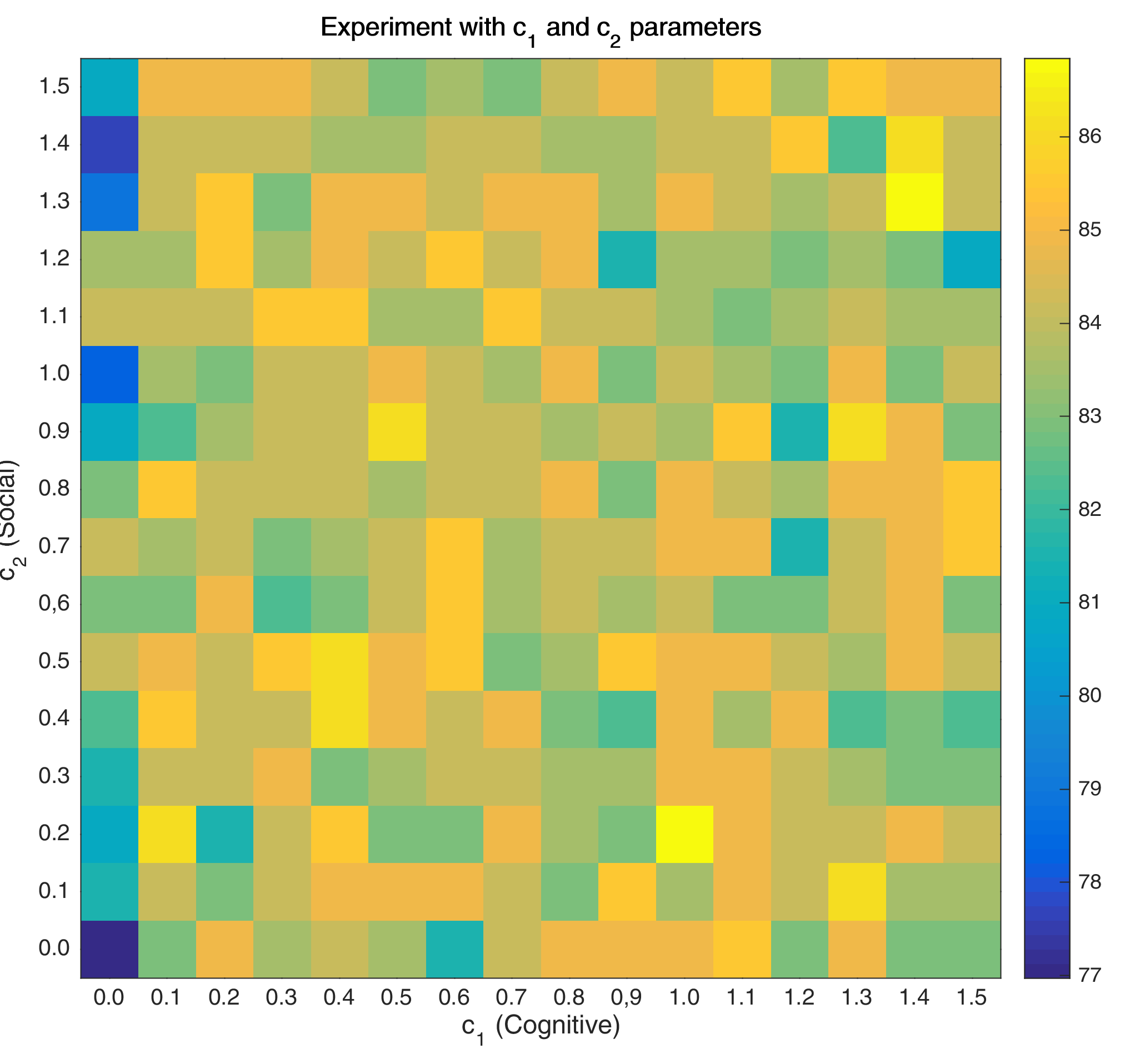
From this value matrix, it is clear that accuracy may improve with values where the ratio of \(c_{1}\) and \(c_{2}\) is \(\approx 1\). Moreover, it also shows that setting a very low cognitive value doesn’t improve the solution. However, because the value matrix doesn’t give anything definitive regarding the settings for \(c_{1}\) and \(c_{2}\), a more heuristic approach is applied.
Observation of Swarm Behavior
The following images below show the simulation of the swarm (only at parameters \(\theta_{11}^{(1)}\) and \(\theta_{12}^{(1)}\)) given different values of the social and cognitive components. Below these simulations, a graph of the cost is traced. One can then see the differences in their behavior by looking on the convergence of the “mean best” with respect to the personal and global bests.
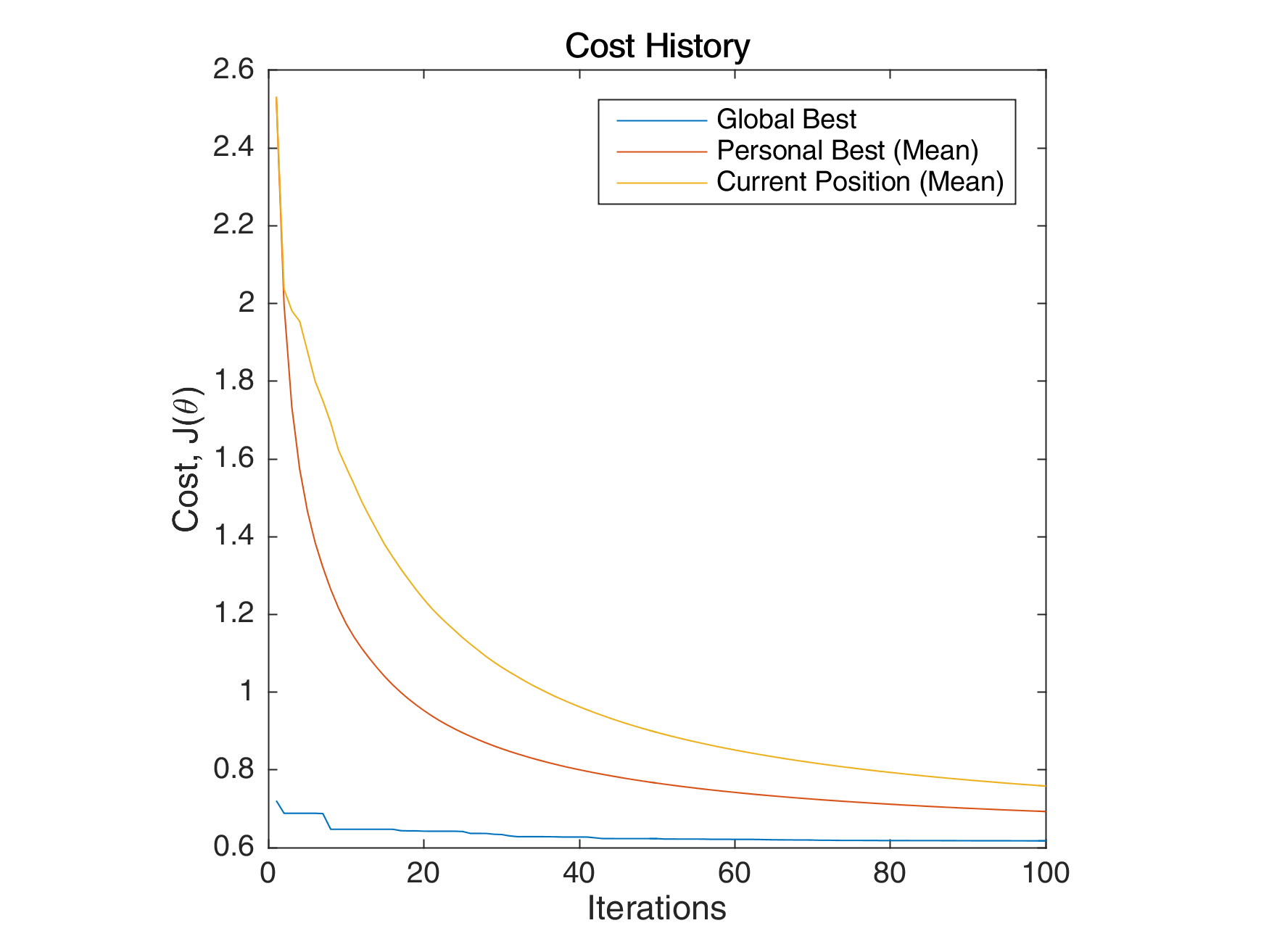
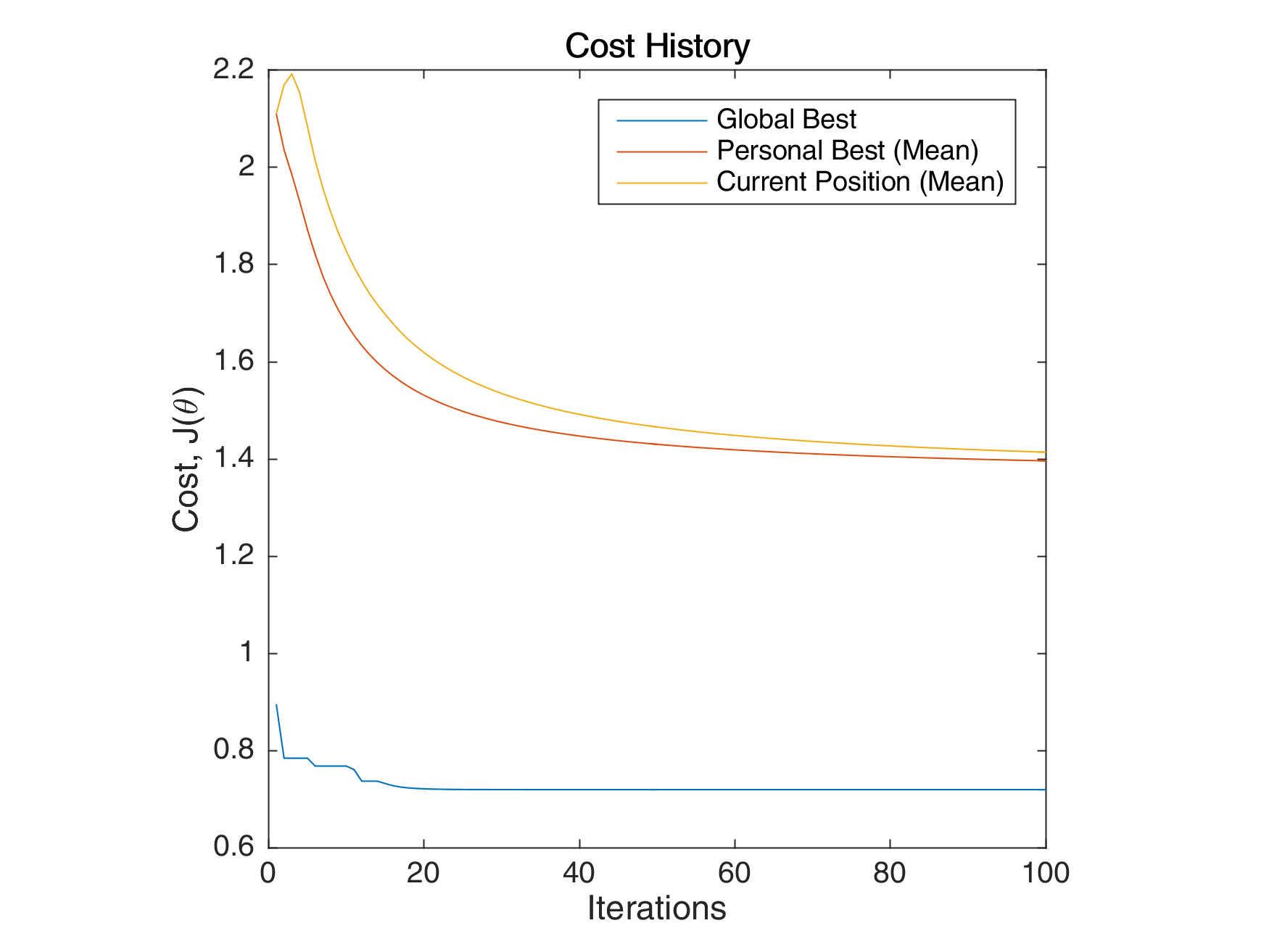
For a swarm that has no cognitive parameter, the particles tend to move to the global best quite early, resulting to a curve that converges easily. On the other hand, for a swarm that has no social parameter, the particles tend to move only to their personal bests, without doing an effort to reach the best score found by the whole swarm.
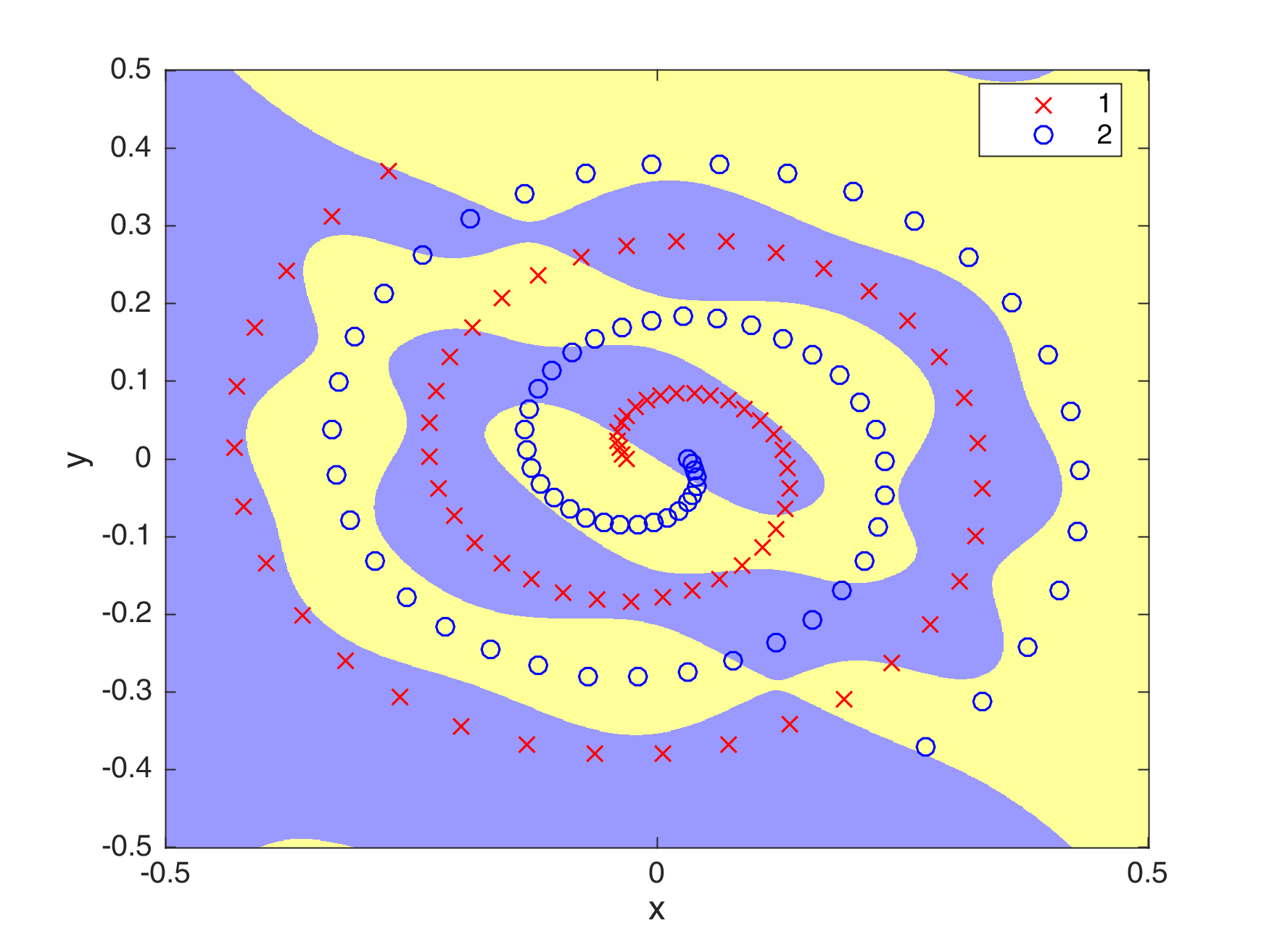
Results
The best score that was achieved using this optimization algorithm is 85.5264% recall. The figure below shows the generalization ability that the algorithm can attain. Moreover, the table below shows the values I set for the parameters.
| Parameter | Value |
|---|---|
maxIter |
200 |
swarmSize |
50 |
epsilon |
0.1 |
c_1 |
1.5 |
c_2 |
0.9 |
inertiaWeight |
0.7 |
Conclusion
One of the main advantage of PSO is that there are only (at a minimum) two parameters to control. Balancing the tradeoff between exploitation and exploration is much easier as compared to other algorithms because it is much more intuitive. However, initialization is also important in PSO. It matters how the particles are distributed along the search space as it may increase or decrease their chances of finding the optimal solution. In this implementation, a small value of \(0.1\) was used for the spread parameter \(\epsilon\).
Compared with the benchmark solution, the PSO has a tendency to run slower. Moreover, as the number of particles increase, the computational time increases because the size of the matrices to be computed also expands. This problem may be solved using advanced vectorization techniques in MATLAB, but overall, the PSO runtime often correlates with the swarm size.
References
- Andries P. Engelbrecht. 2007. Computational Intelligence: An Introduction. John Wiley & Sons, 2nd ed.
- J. M. Sopena, E. Romero, and R. Alquezar. 1999. Neural Networks with Periodic and Monotonic Activation Functions: A Comparative Study in Classification Problems. In Proceedings of the Ninth International Conference on Artificial Neural Networks (ICANN).
- Kevin J. Lang and Michael J. Witbrock. 1988. Learning to Tell Two Spirals Apart. In Proceedings of the 1988 Connectionist Models Summer School. Implementation gist: \urlhttps://gist.github.com/ljvmiranda921/53939299b9e67f0df082e0127c7f229d.